新闻动态
-

仓库内多AGV协作的全局路径规划算法的研究
在实际应用中,一个仓库内多个AGV协作完成订单是不可或缺的部分,而且多个AGV共同运输的过程中同时进行路径规划需要一定的算法做支撑,本文在一个仓库内多个AGV协作进行路径规划的方向上进行算法的研究,对其原理和实现进行分析和介绍。
2018/4/25 0:00:00| -
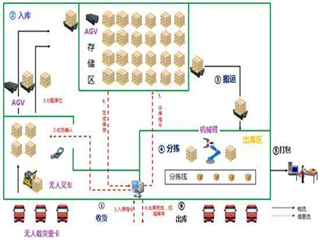
智慧物流—无人仓或将常态化运营,AGV市场空间巨大
仓内机器人包含AGV搬运机器人,AGV分拣机器人,无人叉车,机械臂等,这些机器人具备高度自动化、高效率、高灵活度等特点在业内得到广泛关注,成为越来越多无人仓自动化仓储解决方案的选择。
2018/4/25 0:00:00| -

机器人产业发展 要注重下游产业链
近几年,机器人生产企业如雨后春笋般涌现,机器人系统集成商是连接上游零部件企业、本体企业和下游制造企业的主要桥梁,占据80%的比例。
2018/4/23 0:00:00| -
智能制造推动机器人产业与视觉紧密结合
在智能制造过程中,机器视觉主要用计算机来模拟人的视觉功能,具有人脑的一部分功能一一从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。
2018/4/23 0:00:00| -
AGV小车常用蓄电池有哪些?
AGV常采用24V或48V直流工业蓄电池为动力。蓄电池供电应达到额定的安培小时值,一般应保证8h以上的工作需要,对二班制工作环境则要求17h以上的供电能力.蓄电池充电可采用随机充电和全周期充电两种方式。
2018/4/6 0:00:00|
